4.3 Methods
4.3.1 Overview
We facilitate the comparison of effectively three instruments: the two ground radars and the spaceborne radar (see 4.2). While throughout the study period, the available spaceborne radar platform changed from TRMM (2012–2014) to GPM (2014–2016), the consistency between the two for the year 2014 for the study area allows us to consider the two rather as a single reference instrument. The comparison of the three platforms has two main components:
The SR–GR comparison is motivated by the estimation of the GR calibration bias. We define that bias as the mean difference (\(\overline{\Delta Z}_{SR-SUB}\) or \(\overline{\Delta Z}_{SR-TAG}\), in dBZ) between SR and GR, assuming SR to be a well-calibrated reference. As shown by Crisologo et al. (2018), we can improve the bias estimation if we give a lower weight to those matched samples which we assume to be affected by a systematic GR measurement error. Please note that we use the term calibration bias throughout the paper, as it is more commonly used. Strictly speaking, though, it is rather an “instrument bias” that lumps over any systematic effects of calibration and instrument stability along the radar receiver chain.
The GR–GR comparison is motivated by the evaluation of the consistency between the two ground radars. For that purpose, we can consider the mean difference (\(\overline{\Delta Z}_{TAG-SUB}\)) between the two ground radars (in dBZ) and the standard deviation of the differences (\(\sigma (\Delta Z_{TAG-SUB})\), in dBZ). The differences in the region of overlap of two error-free ground radars would have a mean and a standard deviation of zero. Different levels of miscalibration of the two ground radars would increase the absolute value of the mean difference (which, in turn, implies that the mean difference would be zero if both GR were affected by the same level of miscalibration). But what about systematic measurement errors that are spatially heterogeneous in the region of overlap (such as beam blockage or PIA)? Although they could also affect the mean difference, we expect them to particularly increase the standard deviation of the differences. Hence, a removal of spatially heterogeneous measurements errors from both GRs would reduce \(\sigma (\Delta Z_{TAG-SUB})\), while a correction of calibration bias of both GRs would reduce the absolute value of(\(\overline{\Delta Z}_{TAG-SUB}\)). And while we admit that neither (\(\overline{\Delta Z}_{TAG-SUB}\)) nor \(\sigma (\Delta Z_{TAG-SUB})\) could be considered imperative measures of reliability of any of the two ground radars, we still assume that any decrease in their absolute values would raise our confidence in any of the two radars’ reflectivity observations.
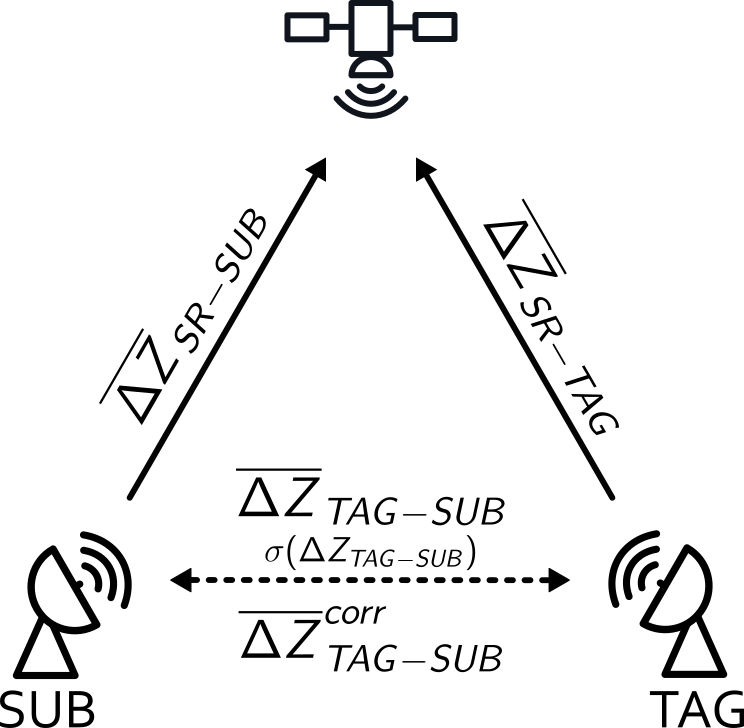
Figure 4.2: Schematic diagram of the SR-GR calibration bias estimation and GR-GR inter-comparison. The SUB and TAG calibration biases (\(\overline{\Delta Z}_{SR-SUB}\) and \(\overline{\Delta Z}_{SR-TAG}\), respectively) are calculated with respect to SR, and used to correct the ground radar reflectivities. The mean difference between SUB and TAG radars are calculated before (\(\overline{\Delta Z}_{TAG-SUB}\)) and after bias correction (\(\overline{\Delta Z}^{corr}_{TAG-SUB}\))
References
Crisologo, Irene, Robert A. Warren, Kai Mühlbauer, and Maik Heistermann. 2018. “Enhancing the Consistency of Spaceborne and Ground-Based Radar Comparisons by Using Beam Blockage Fraction as a Quality Filter.” Atmospheric Measurement Techniques 11 (9): 5223–36. https://doi.org/https://doi.org/10.5194/amt-11-5223-2018.